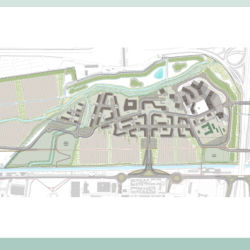
- Progetto del nuovo quartiere AT1-’Città Nuova’ nel Comune di Rozzano: Soluzioni di mobilità sostenibile “Una città umana non separa le sue funzioni: la casa qui, il lavoro là, il tempo libero là…Una città umana è quella che crea la mescolanza: delle attività, dei redditi, delle età. Più è mista, più è umana.” (Jaime Lerner Architetto e Urbanista) Lo studio affronta e offre le soluzioni relative alla mobilità generati dal futuro sviluppo del comparto urbano AT1 – Città Nuova nel Comune di Rozzano (MI). Solide analisi multidisciplinari hanno portato all’individuazione di un giusto mix funzionale che consenta un intervento di qualità, sostenibile dal punto di vista ambientale, insediativo, sociale ed economico. L’area nord, a vocazione terziaria, costituisce il volano di sviluppo per tutto l’intervento AT1. Il lotto sud, ad oggi agricolo e separato dal contesto, accoglie le residenze e la restante parte di terziario. Le principali attività condotte da TRT nell’ambito dello sviluppo del Masterplan dell’area hanno riguardato: la selezione di un valido scenario di mobilità (trasportistico e infrastrutturale), in grado di svilupparsi nel tempo in funzione dell’evoluzione dell’intervento insediativo, con particolare riferimento alle prospettive di una mobilità sostenibile, a basso impatto e con standard gestionali elevati; lo sviluppo di uno studio trasportistico che attraverso solide analisi quantitative e simulazioni modellistiche, definisce le caratteristiche prestazionali e il livello di accessibilità dello schema trasportistico selezionato per l’area. Progetti correlati – Programma Integrato di Intervento “PII1 –Milanofiori Sud”
- Autostrada Cremona – Mantova Le attività di TRT hanno riguardato, dopo gli studi sviluppati negli anni precedenti, l’analisi della domanda e dell’offerta attuale di trasporto; la stima della domanda sulla nuova infrastruttura; la valutazione dei flussi di traffico e dei livelli di servizio relativamente agli scenari considerati, con particolare riferimento alle tariffe. TRT ha inoltre sviluppato un’analisi di dettaglio sull’utilizzo attuale della tangenziale di Mantova, per comprenderne ruolo ed eventuali potenzialità e vincoli all’interno del sistema autostradale, secondo numerosi schemi di adeguamento funzionale e gestionale.
- Previsione dei flussi di traffico dell’interconnessione autostradale A1-A15 (TiBre, Tirreno Brennero) Previsioni di traffico e analisi della funzionalità sul nodo di interconnessione autostradale A1–A15–TiBre. Le attività hanno riguardato: la stima dei flussi previsti al nodo per l’anno 2025 rivedendo le stime precedentemente prodotte nell’ambito della redazione del Progetto Definitivo per il Raccordo Autostradale Autostrada della Cisa A15 – Autostrada del Brennero A22, la stima del Livelli di Servizio delle rampe d’immissione ed uscita su A1 e delle rampe d’immissione su A15 e TiBre secondo quanto previsto dalla metodologia Highway Capacity Manual 2000, la valutazione di funzionalità delle rampe d’immissione su A1, A15 e TiBre attraverso l’utilizzo di un modello di microsimulazione AIMSUN.
- Analisi trasportistica delle strategie e degli interventi per la viabilità e i parcheggi dell’Aeroporto di Venezia La consulenza di TRT mira a definire le infrastrutture land-side dell’Aeroporto Marco Polo di Venezia in funzione degli interventi sia di breve che di medio-lungo periodo legati al nuovo Masterplan Aeroportuale. L’attività è suddivisa in due fasi: la Prima Fase è finalizzata a supportare il committente nella individuazione: i) degli ambiti di attestamento dei servizi di Trasporto Pubblico di linea; ii) della nuova area di sosta dei bus commerciali e del relativo lay-out. la Seconda Fase ha lo scopo di definire le caratteristiche prestazionali, il livello di accessibilità degli schemi di circolazione proposti. La valutazione e validazione degli scenari di medio e lungo termine (2021-2027) si avvale di un modello di micro-simulazione dinamica dei flussi veicolari dell’intera area di studio.
- Piano Generale del Traffico Urbano (PGTU) di Prato Dopo aver redatto il PUMS (strumento strategico di pianificazione della mobilità con validità decennale) approvato nel 2016, TRT è stata incaricata della redazione del Piano Generale del Traffico Urbano (PGTU) della città di Prato. Il PGTU si configura come piano d’azione del PUMS, dettagliando gli interventi previsti da quest’ultimo nello scenario di riferimento e di piano nel breve periodo. Le attività hanno riguardato: la progettazione e la supervisione di una campagna di rilevi dei flussi di traffico presso 12 sezioni e 15 intersezioni urbane; l’adattamento ad una scala più dettagliata del modello AIMSUN di simulazione del traffico (già a disposizione dell’Amministrazione Comunale) e la sua calibrazione; la costruzione dello Scenario di Riferimento, comprendente gli interventi già decisi e finanziati e dello Scenario di Piano con particolare attenzione alle misure realizzabili nel breve periodo (rete viaria e sua regolamentazione, trasporto pubblico, ciclabilità, politiche di gestione della domanda di mobilità, sistema della sosta, logistica, strumenti tecnologici), coerenti con quanto proposto dal PUMS; la valutazione modellistica dello Scenario di Piano nonché la preparazione dei relativi indicatori e output grafici. Il PGTU è stato adottato e approvato dalla Giunta Comunale con delibera n. 477 del 27/12/2018.
- Shanghai Jinshan Marina Urban Planning (China) A seguito del concorso internazionale per il Masterplan della nuova marina di Jinshan, a sud di Shanghai, vinto da un consorzio guidato da GALA engineering, TRT è stata incaricata di progettare la nuova viabilità e il Sistema di trasporto pubblico a servizio dell’area. Il progetto integrava due soluzioni innovative: un Sistema di trasporto pubblico multimodale basato su di una linea di bus, il servizio ferroviario e un innovativo sistema su rotaia. Un Sistema di trasporto dedicato al Nuovo porto crocieristico offshore in grado di accogliere migliaia di turisti al giorno. Area: 2.6 milioni di metri quadrati Dimensionamento delle aree di parcheggio a servizio di numerose e differenti funzioni urbane in grado di accogliere sino a 150 mila utenti al giorno. Dimensionamento di parking hub strategici in grado di assorbire i carichi stagionali dei flussi turistici in partenza dal porto crociere Definizione di una rete di percorsi ciclabili e pedonali lungo le vie d’acqua e sul lungo mare della nuova marina di Jinshan
- Piano Urbano della Mobilità Sostenibile – Conferenza Metropolitana di Padova TRT, insieme a Technital, Atraki e Avanzi, ha supportato la struttura tecnica del Comune di Padova per la redazione del Piano Urbano della Mobilità Sostenibile di Padova e della CoMePa (adottato con delibera di Giunta n.2020/17 – del 14/01/2020). La prima fase di redazione del PUMS si è conclusa a ottobre 2016 con l’approvazione del Rapporto di Prima fase “Rapporto quadro conoscitivo”, a valle delle attività di ricostruzione del quadro conoscitivo, della realizzazione delle indagini conoscitive (viabilità, sosta e tpl), dell’organizzazione di momenti partecipativi per raccogliere le istanze dei portatori di interesse, della costruzione del modello multimodale di simulazione dei trasporti e della redazione delle Linee di Indirizzo. Le dimissioni della Giunta comunale del 11 novembre 2016, ha portato alla sospensione delle attività. A settembre 2017 è ripresa l’interlocuzione con le amministrazioni locali dei 18 comuni della Conferenza Metropolitana di Padova (CoMePa) con l’obiettivo di procedere alla redazione di un PUMS di area sovracomunale. Nel corso del 2018 si è completata la Fase 2 del PUMS dando seguito alla elaborazione della Proposta di Piano, presentata agli organi tecnici e politici del Comune di Padova e dell’Assemblea Comepa a settembre dello stesso anno. La proposta di Piano è stata sottoposta ad una verifica puntuale degli interventi attraverso gli incontri con gli organi tecnici e politici dei 18 comuni CoMePa. Il percorso di condivisione si è completato nei mesi successivi. Nel corso del 2019 si è conclusa la Fase 3 che ha sviluppato le valutazioni quantitative degli interventi del Piano e la stesura del documento finale del PUMS da portare all’adozione ed alla approvazione da parte degli Enti. Gli Scenari di Piano e le loro valutazioni sono stati condivisi con l’Assemblea CoMePa e l’esito degli incontri ha portato ad inserire nello scenario PUMS misure per favorire la transizione verso una mobilità low carbon, attraverso azioni di shift modale, l’introduzione di un’area di regolazione degli accessi veicolari (Low Emission Zone -LEZ) per Padova, azioni che favoriscano una maggiore penetrazione anche in ambito locale dei veicoli a trazione elettrica ed a basso impatto ambientale. Per approfondimenti Elaborati consultabili su padovanet.it “Sustainable Urban Mobility Plan (SUMP) of Padova and metropolitan area”. Caso studio pubblicato su Eltis Platform
- Redazione del Piano Urbano della Mobilità Sostenibile del Comune di Parma TRT è stata selezionata dal Comune di Parma per la redazione del PUMS. Il primo step di questo percorso ha visto la redazione delle linee di indirizzo del piano e, successivamente, nel corso del 2016, la predisposizione della proposta di piano. L’elaborazione del PUMS ha comportato: la ricostruzione del quadro delle conoscenze del settore della mobilità; l’analisi dei punti di forza e di debolezza del sistema della mobilità e dei suoi impatti; l’individuazione del set di obiettivi e la loro gerarchizzazione sulla base delle indicazioni della comunità locale e dei decisori pubblici; la redazione delle linee di indirizzo del Piano e la loro condivisione con l’Amministrazione (delibera di Giunta, 09/2015); la definizione degli scenari alternativi di piano, condivisi con la comunità degli attori locali, con la cittadinanza e con i decisori pubblici; la valutazione di sostenibilità tecnica, economica, ambientale e sociale degli scenari di piano; l’individuazione dello scenario di piano vincente. Il PUMS di Parma è stato approvato con delibera di C.C. 2017- 870 il 21 marzo 2017. Il Documento di Piano è accompagnato dalla procedura di VAS con parere motivato della Regione Emilia Romagna ai sensi dell’art. 15 del D.lgs. n 152/2006, Delibera GR 239 del 06/03/2017. Per approfondimenti Elaborati consultabili su comune.parma.it “Parma’s SUMP: the first in Italy combined with a Strategic Environmental Assessment”. Caso studio pubblicato su Eltis Platform TRT è stata incaricata nel 2019 per coordinare il Master Mobility Plan e sviluppare il monitoraggio del PUMS ed è stata anche responsabile della redazione del Piano Generale del Traffico Urbano di Parma.
- Piano Urbano della Mobilità Sostenibile ed aggiornamento del Piano Generale del Traffico Urbano di Alessandria TRT è stata selezionata dal Comune di Alessandria, attraverso una gara, per la redazione del Piano Urbano della Mobilità Sostenibile (PUMS) e l’aggiornamento del Piano Generale del Traffico Urbano (PGTU) vigente. L’attività di redazione dei due Piani ha comportato: la ricostruzione del quadro conoscitivo relativo al sistema della mobilità di Alessandria e ai suoi impatti ambientali, sociali ed economici, anche attraverso una estesa compagna di indagini sul campo (flussi veicolari, offerta e domanda di sosta, passeggeri trasporto pubblico); l’individuazione delle strategie del PUMS-PGTU sviluppate tenuto conto dalla conoscenza del contesto locale, degli obiettivi e delle linee di indirizzo predisposte dall’Amministrazione Comunale; il disegno degli scenari alternativi di piano: Scenario di Riferimento e Scenario di Piano, ognuno dei quali articolato considerando interventi di breve (2 anni – con interventi inclusi nel PGTU) e di lungo periodo (10 anni); la valutazione degli scenari alternativi di Piano attraverso l’applicazione di un modello di traffico AIMSUN rappresentativo della scala urbana. Sono stati inoltre sviluppati specifici documenti di approfondi-mento quali il Piano della Sosta e il Piano di riassetto del Trasporto Pubblico urbano. Il PUMS-PGTU è stato adottato con delibera di Giunta Comunale n. 168/16110-220 il 9/06/2017. A seguito dell’insediamento di una nuova Amministrazione Comunale, nel 2019 TRT ha provveduto ad aggiornare i documenti di Piano e ad accompagnarne l’iter amministrativo della nuova versione fino all’approvazione. Dopo l’ulteriore adozione avvenuta a settembre 2019, il PUMS-PGTU nella sua versione finale è stato approvato dal Consiglio Comunale il 10/06/2020 con la delibera n. 31.